How this Snake Robot Climbs Over Obstacles
Channel: James Bruton
Category: Science & Technology
Tags: bendy robotperistaltic locomotion3d printed robotmulti-wheeled robotclimbing robotarduino mega servo wheeled robotsnake robotinnovative robotworm robot3d printing roboticshow to build a robotarduino robotrobot innovationhome made robotflexible robot
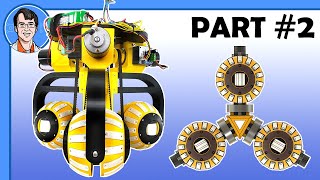
Description: AD Start your free trial to Altium Designer for 15 days: altium.com/yt/jamesbruton I previously made a worm robot, which used Peristaltic locomotion – expanding and contracting various segments of its body to push itself along. I’d intended to come back to this project and add some ratchet wheels on each segment – just like the hairs that can be found on real earthworms, which would help prevent slippage. I’d also intended to add more actuators so that the worm could bend side to side to steer, and also bend up and down so it could climb over objects. I’ve also previously experimented with various wheel alternatives, to see how robots can climb over objects. This included a hybrid-leg-wheel robot, and my Pedrail wheels, which had fourteen extending legs around the circumference of the wheel which run on a rotating guide in the wheel hub. So I’ve decided for now, to build a new robot which has actively driven wheels, and can also bend in two axes between each segment. This robot will be made from several identical modules that are linked together, each one with a driven set of wheels and some servos to make it flex. CAD and Code: github.com/XRobots/Snake You can support me on Patreon or buy my Merchandise: *************************** Patreon: patreon.com/xrobots Merchandise: teespring.com/stores/james-bruton *************************** Affiliate links - I will get some money of you use them to sign up or buy something: *************************** Matterhackers 3D printing supplies: matterhackers.com?aff=7500 Music for your YouTube videos: share.epidemicsound.com/xrobots *************************** Other socials: *************************** Instagram: instagram.com/xrobotsuk Facebook: facebook.com/xrobotsuk Twitter: twitter.com/xrobotsuk *************************** CAD and Code for my projects: github.com/XRobots Huge thanks to my Patrons, without whom my standard of living would drastically decline. Like, inside out-Farm Foods bag decline. Plus a very special shoutout to Lulzbot, Inc who keep me in LulzBot 3D printers and support me via Patreon. HARDWARE/SOFTWARE Below you can also find a lot of the typical tools, equipment and supplies used in my projects: Filament from: 3dfuel.com Lulzbot 3D Printers: bit.ly/2Sj6nil Bearings from: simplybearings.co.uk Lincoln Electric Welder: bit.ly/2Rqhqos CNC Router: bit.ly/2QdsNjt Ryobi Tools: bit.ly/2RhArcD Axminster Micro Lathe: bit.ly/2Sj6eeN 3D Printer Filament: bit.ly/2PdcdUu Soldering Iron: bit.ly/2DrNWDR Vectric CNC Software: bit.ly/2zxpZqv Why not join my community, who are mostly made up of actual geniuses. There’s a Facebook group and everything: facebook.com/groups/287089964833488 XROBOTS Former toy designer, current YouTube maker and general robotics, electrical and mechanical engineer, I’m a fan of doing it yourself and innovation by trial and error. My channel is where I share some of my useful and not-so-useful inventions, designs and maker advice. Iron Man is my go-to cosplay, and 3D printing can solve most issues - broken bolts, missing parts, world hunger, you name it. XRobots is the community around my content where you can get in touch, share tips and advice, and more build FAQs, schematics and designs are also available.